Zdravím rodiče zličínských programátorů,
tématem dnešní lekce byly 4 druhy vozítek. Důvodem tohoto tématu bylo, aby si děti vyzkoušely, jaké jsou možnosti při konstrukci robota na kolečkách.
Každý dostal záznamový arch testování. Po sestrojení vozítka podle návodu bylo za úkol sestavit program na jízdu vpřed, couvání, zatáčení a překonání překážky. Každé vozítko se testovalo, zda úkol splní. Autoři výsledky zapisovali do tabulky. Každá konstrukce má svoje specifika, které jsme si shrnuli po dokončení testování. Řekli jsme si jejich výhody i nevýhody.
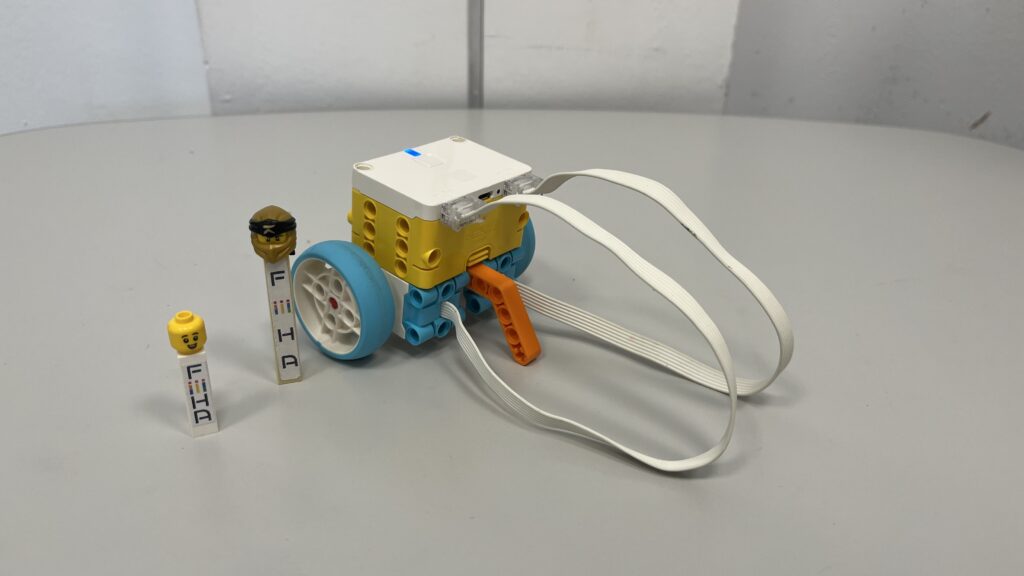
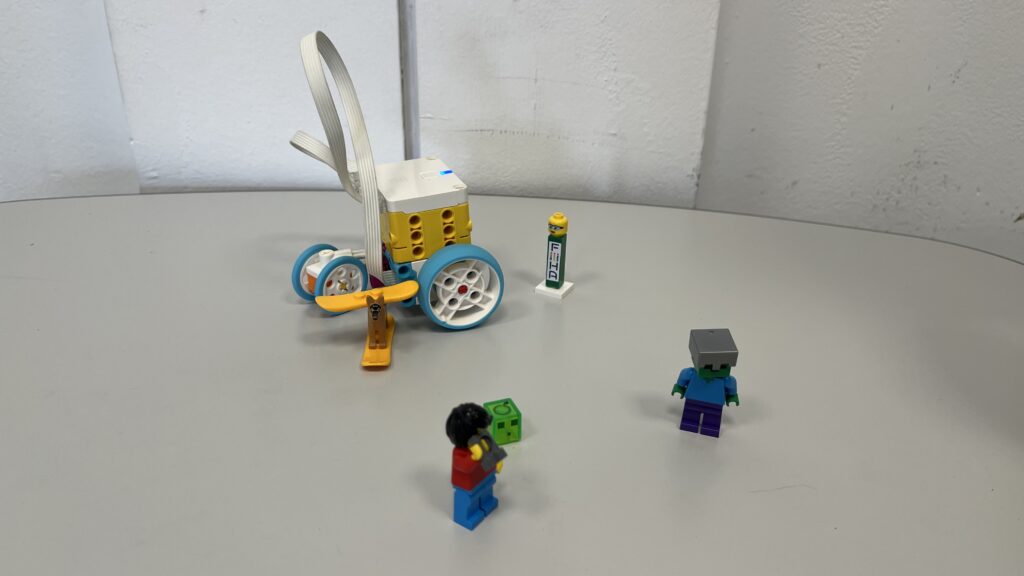
VOZÍTKO Č.1 : jednoduchý stroj se 2 koly a zadní oranžovou tyčkou. Ta sloužila jako stabilizační prvek, aby robot byl schopen jízdy. Pokud by tam oranžová tyčka nebyla, mozek robota by se otáčel o 360 stupňů a vozítko by nejelo.


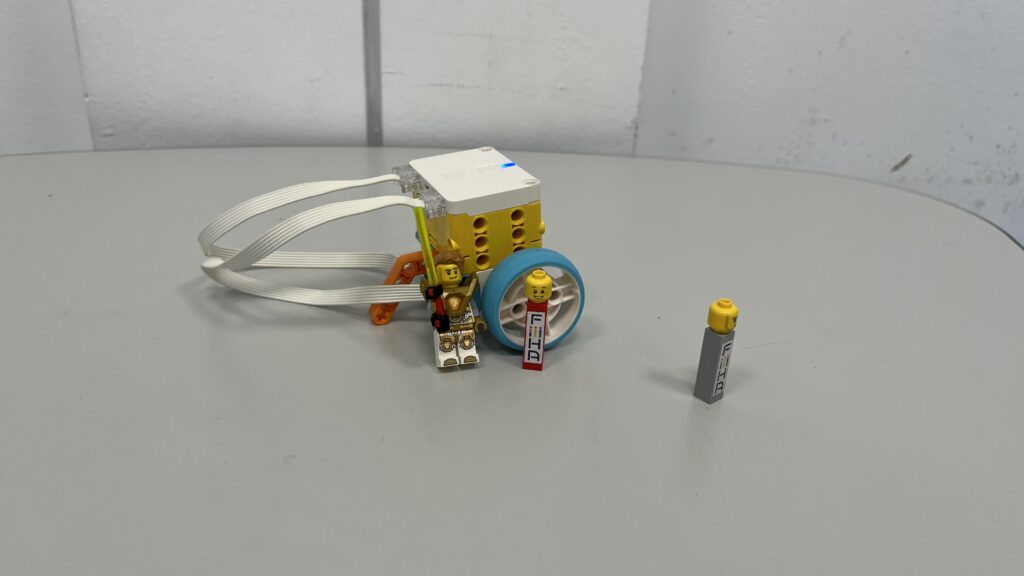



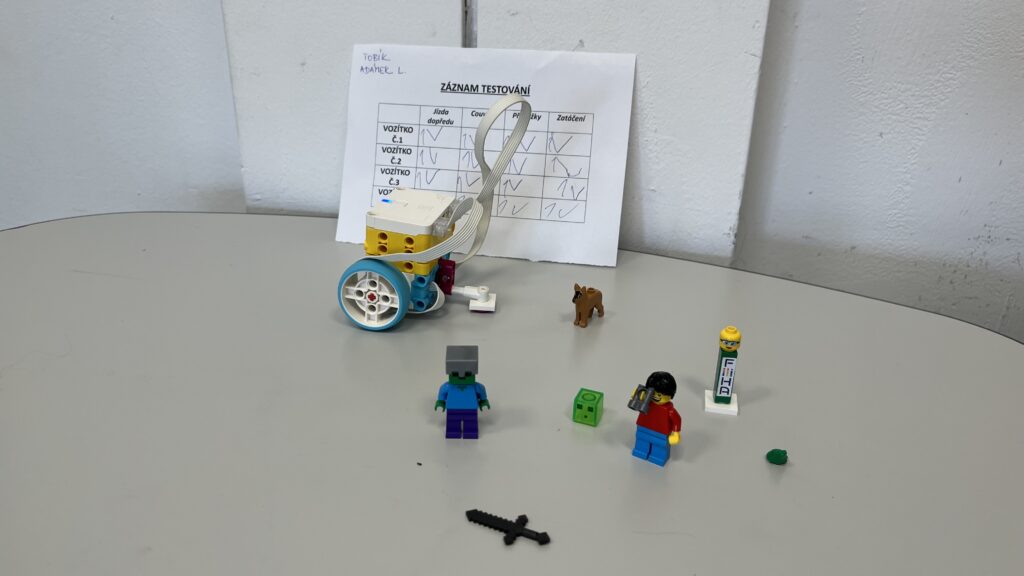
VOZÍTKO Č.2 : pevnější konstrukce kol k mozku robota. V zadní části 2 lyžiny, které lépe kopírovali jízdu vozítka. Výsledný pohyb byl přesnější hlavně u zatáčení.



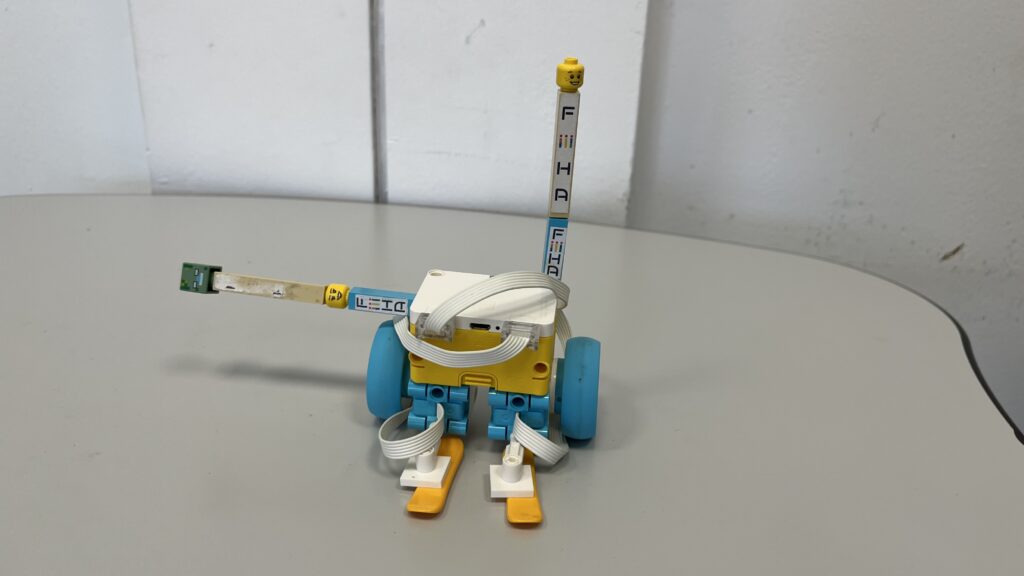


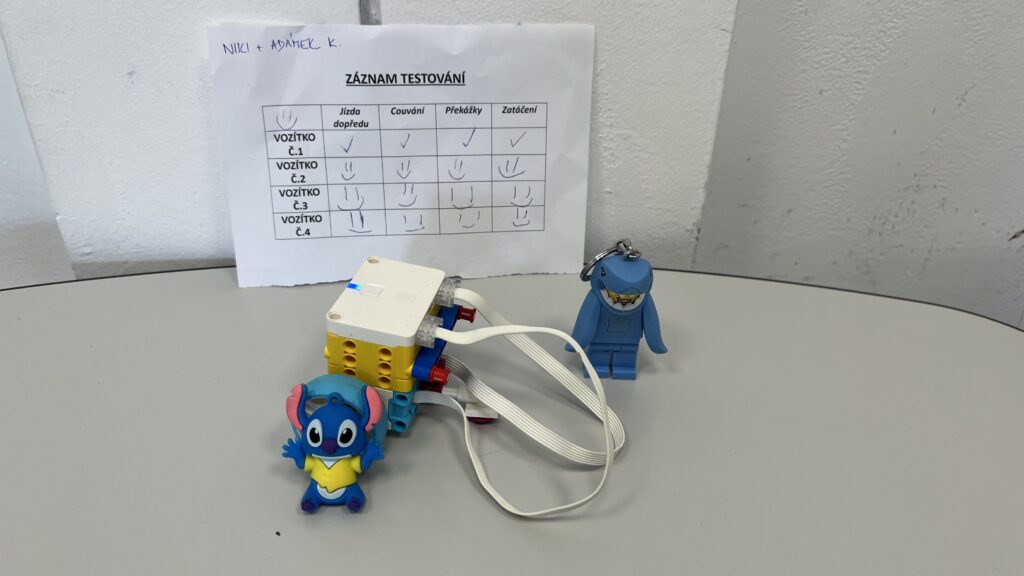
VOZÍTKO Č.3 : v zadní části otočné dvojkolo, zase stabilizační prvek. Vzhledem k domu, že zadní kola se dokázala otočit i na plochu disku, vozítko bylo schopné překonat vyšší překážku, ale nedokázalo dobře zatáčet.






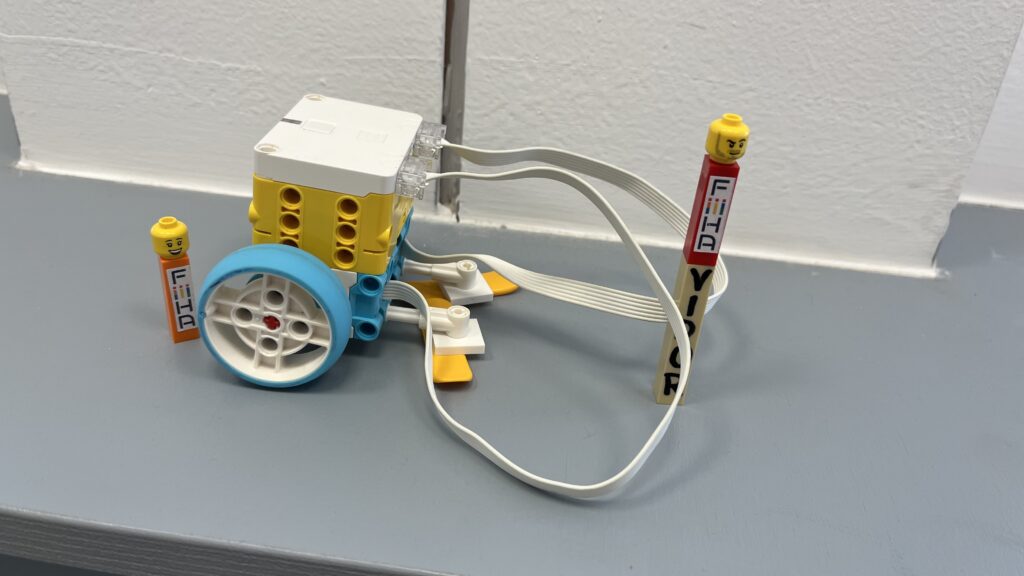
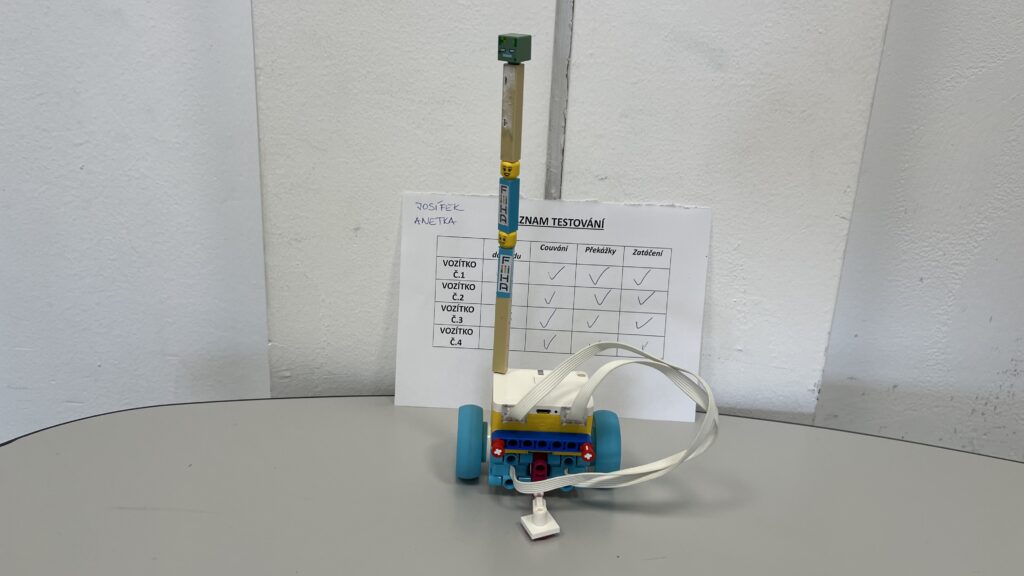
VOZÍTKO Č.4 : stabilizační prvek v zadní části vozítka byl nápomocný pří překonávání překážek, ale nebyl dostatečně funkční jako u vozítka č.3. Bylo to dané jeho tvarem a malou výškou. Zadní čtvereček se zasekával o vyšší překážky, ale byl vhodnější konstrukcí při zatáčení. Nedokázal se převrátit.




Ani mě nepřekvapilo, že někomu zbyl čas u 4.vozítka na programování jízdy kolem židle. Tady si neodpustím jmenovitě pochválit: ROBINA & MARTÍNKA, THEA & SUYASHE, TEDÍKA & DANÍKA, ANETKU & JOSÍFKA. PERFEKTNÍ PRÁCE 💪
Velká pochvala patří všem za skvělou lekci. Díky kamarádi ☺️
Těším se na další lekci.
Hanka Vítková
lektor kroužku Lego® robotika