Zdravím rodiče zličínských programátorů,
před podzimními prázdninami malá ochutnávka z tématu čtvrté lekce.
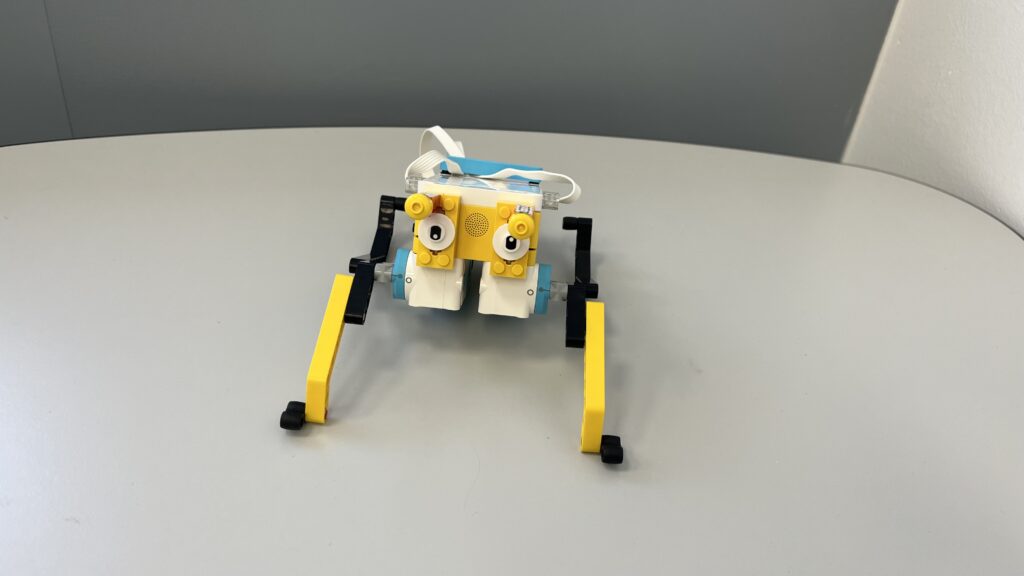
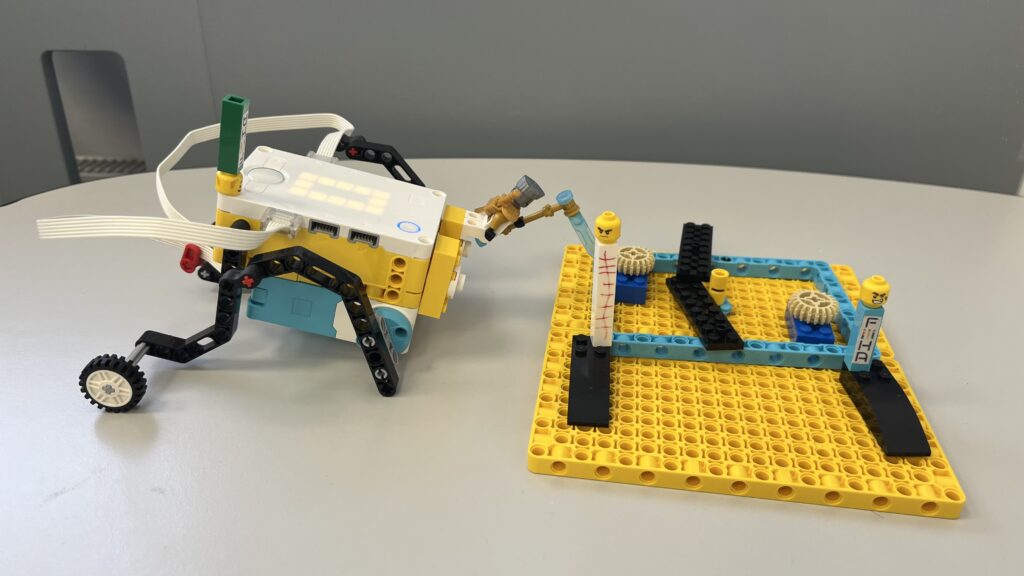
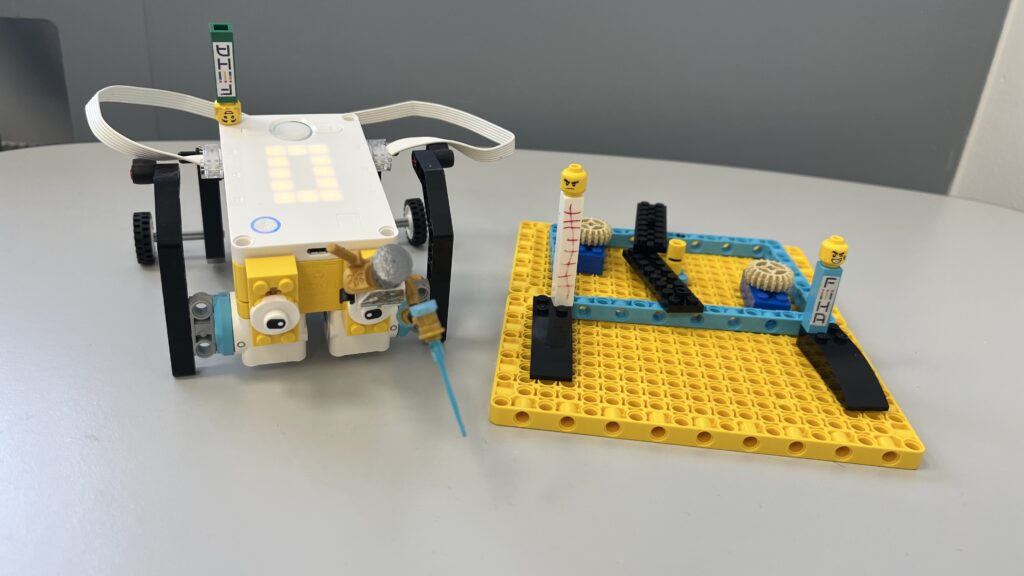
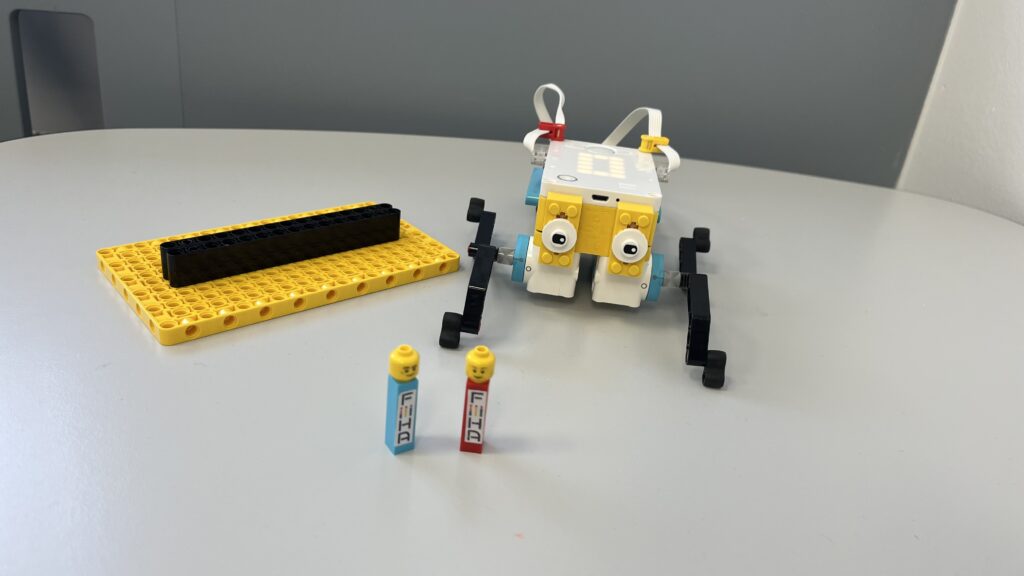
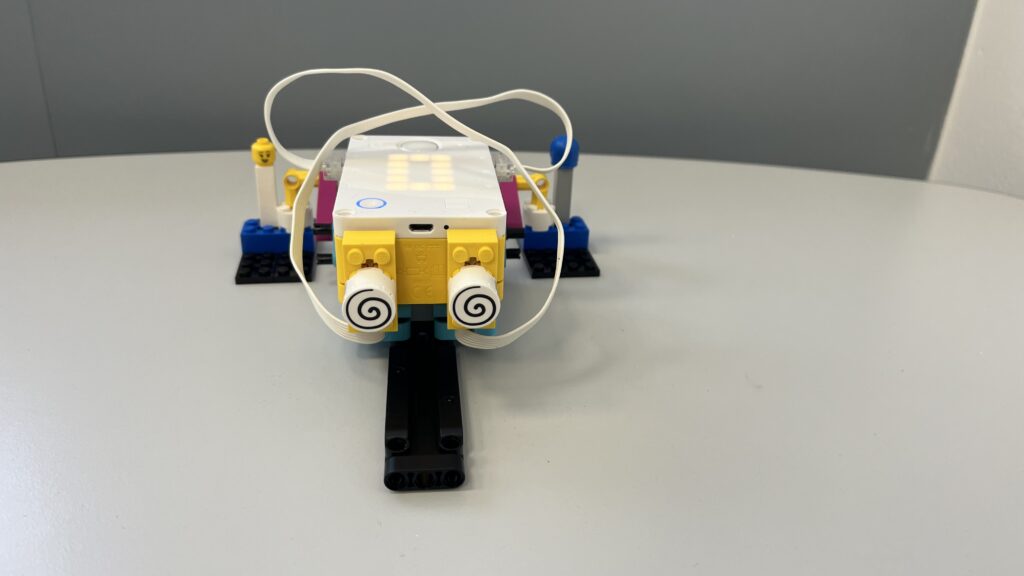
Na čtvrté lekci bylo téma KOBYLKA. Jednalo se o robota, který pomocí motorů a na nich připojených ,,nožek,, byl schopen pohybu dopředu. Na samotném těle robota, na HUBu, byl naprogramován odpočet než se začala kobylka pohybovat. Návrh nohou byl velmi jednoduchý a pohyb by se dal hodnotit jako primitivní. Proto jsme si dali za úkol vymyslet nový prototyp skákacích nohou, aby kobylka byla schopná překonat překážku. Překážku si každá dvojice postavila z Lego® krabice, dále bylo potřeba překonat houbu na tabuli a ovladač od interaktivní tabule. Na nový prototyp byla podmínka, že se nesmí použít kola napojená na motory😁. Tato podmínka vedla ke vzpouře ve skupině. Nakonec se kola povolila do konstrukce podpěrných nohou. Sami jste měli možnost vidět😉.
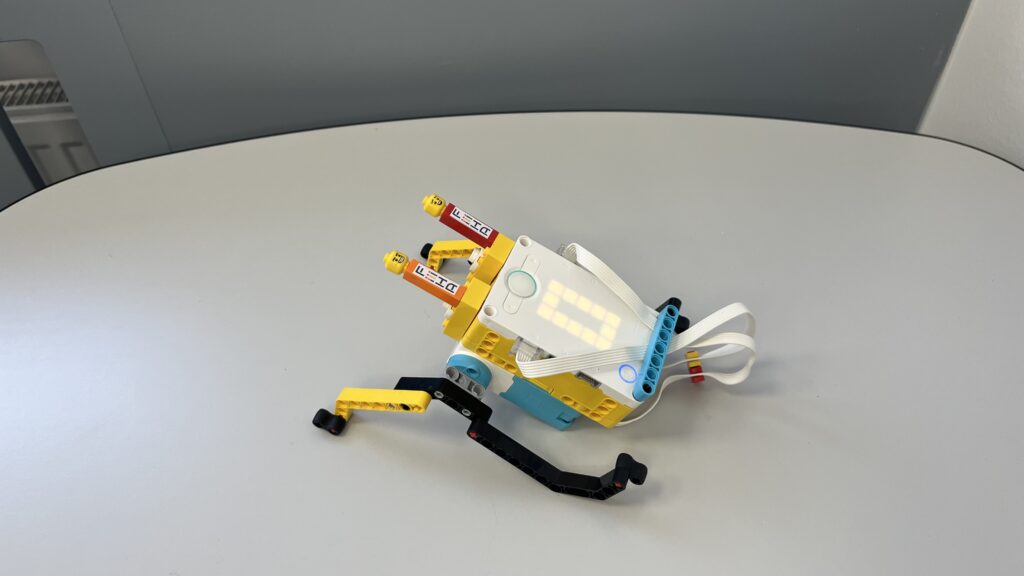
Při testování prototypů nohou jsme naráželi na problém, kdy tělo kobylky se otáčelo o 360 stupňů mezi dvěma motory. Díky tomu jsme si mohli připomenout a zopakovat, proč se to děje a jak tomu zabránit pomocí stabilizačního prvku. 👍



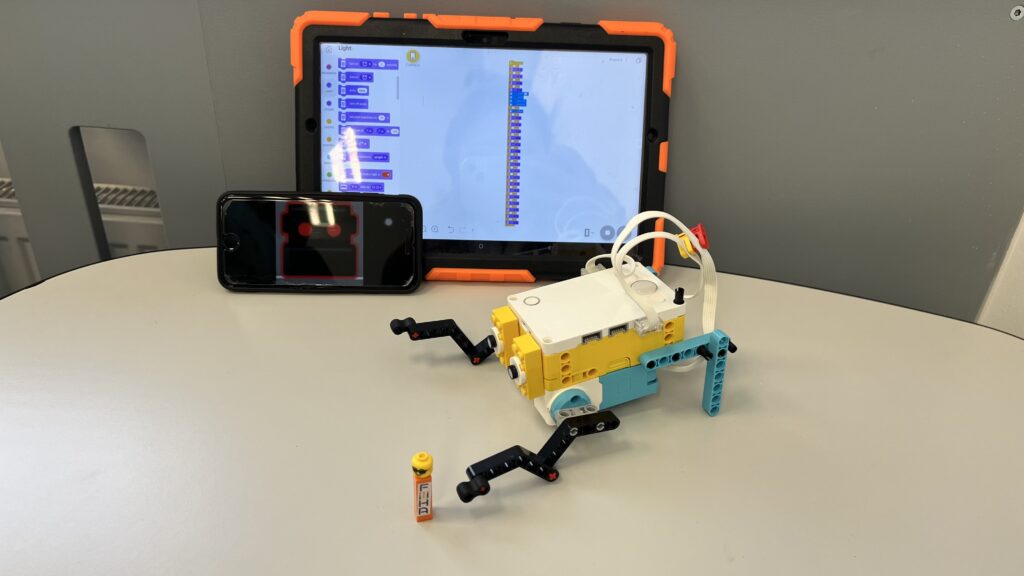
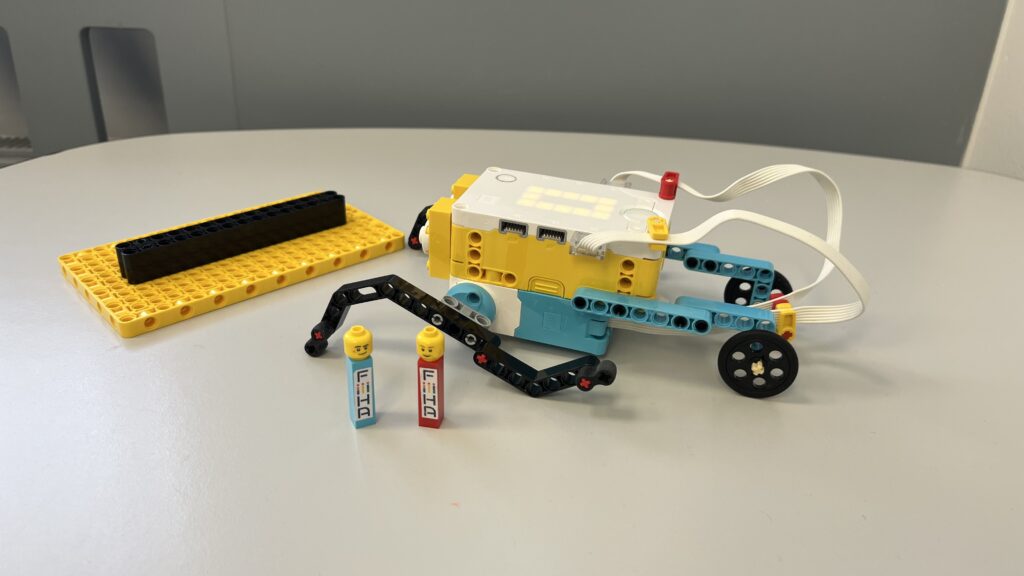
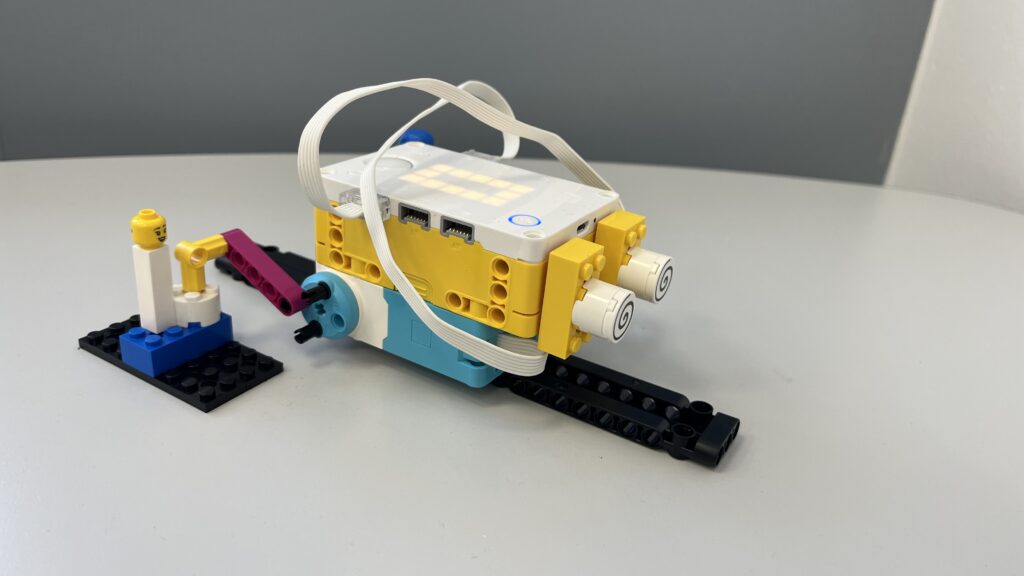
Klobouk dolů, kolik energie děti do práce vložily a jakého skvělého výsledku dosáhly. Zpracování každé dvojice bylo originálem – v konstrukci, v programu, ve výsledném pohybu robota. To musíte ohodnotit z videa i fotek.
Krásné podzimní prázdniny.
Hanka Vítková
lektor kroužku Lego® robotika