Zdravím rodiče zličínských programátorů,
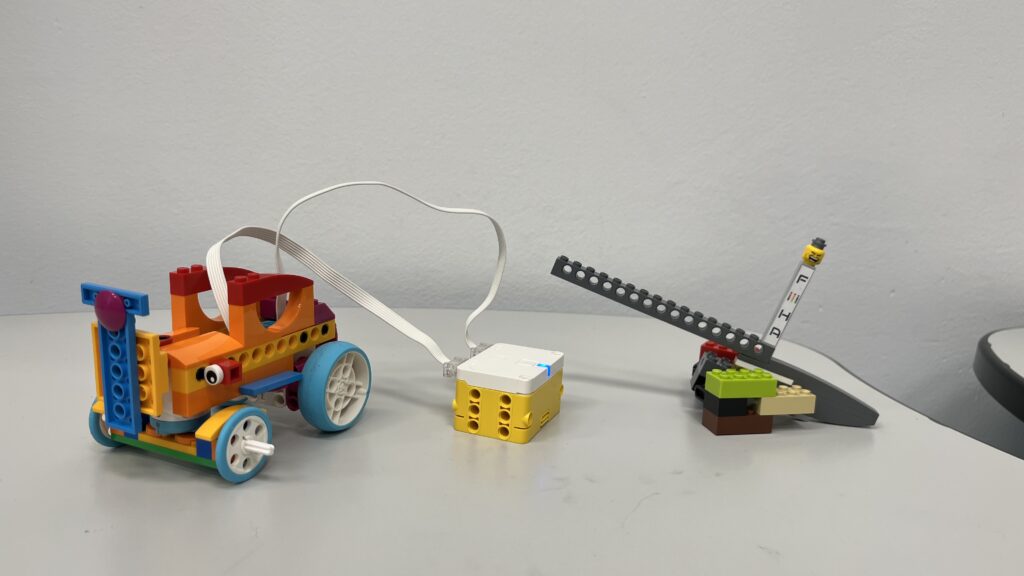
téma dnešní lekce není úplně přesné, ale lepší pojmenování se mi nepovedlo vymyslet. Autíčka na dálkové ovládání zaplnila podlahu učebny. Ovládacím prvkem auta se stal HUB, který byl spojený dráty s robotem. Kde zůstalo místo na podlaze, zaplnilo se ,,lezoucími,, dětmi za autem😉.
Úvodní teorie působila velmi komplikovaně a mnoho dětí se bálo, že tahle lekce bude velká nuda. Vysvětlovali jsme si, že HUB = mozek robota není jenom obyčejná krabička přenášející informace z tabletu do elektronických součástek robota. Jedná se taky o šestiosý gyroskop skládající se z tříosého gyroskopu a tříosého akcelorometru. Gyroskop sleduje naklonění HUBu vůči podlaze (úhel, který s podlahou svírá) a akcelerometr (pohybový senzor) převádí naklonění HUBu do pohybu robota. Vysvětlili jsme si, proč každá ze součástek má tři osy a zavedli jsme další složitý pojem: soustava souřadnic.
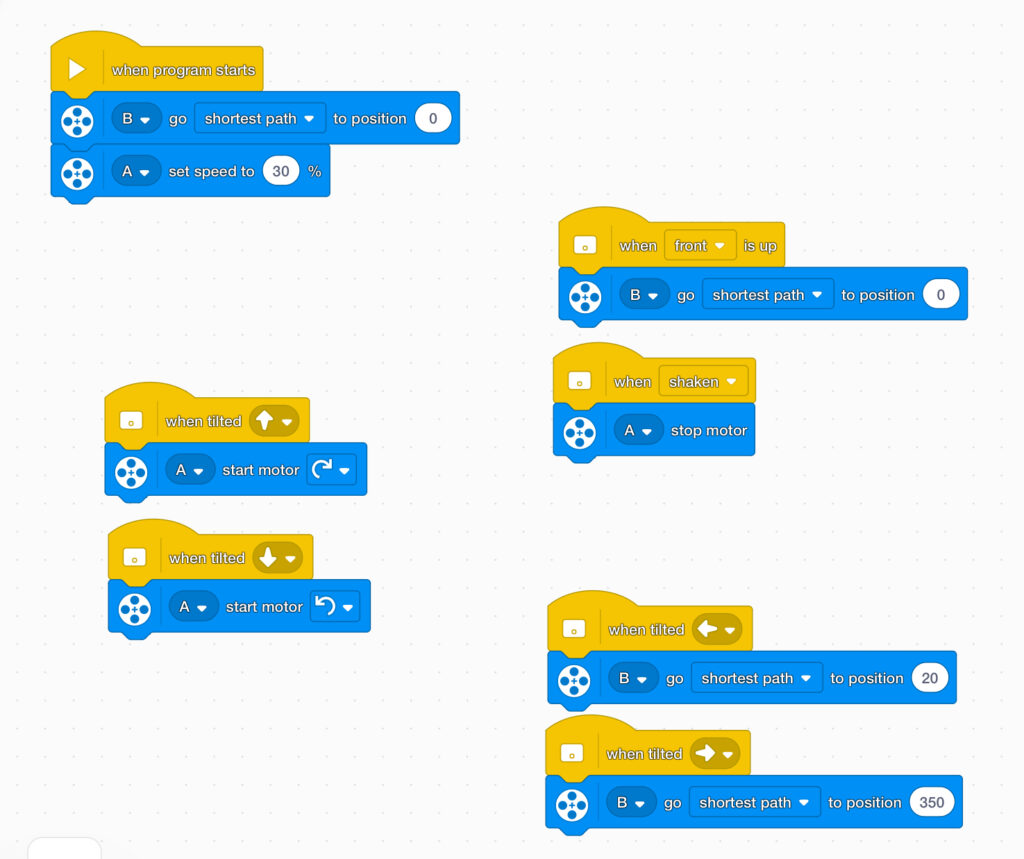
Pro perfektní funkčnost auta bylo i tentokrát zapotřebí programovat ve Scratchi. Po spuštění programu se srovnala kola do výchozích pozic motorů. Náklon HUBu dopředu = jízda dopředu, náklon dozadu = couvání, náklon doprava = zatáčení doprava, náklon doleva = zatáčení doleva, zatřesením HUBu ve vzduchu = zastavení auta + srovnání kol pro jízdu dopředu. Po stručném popisu raději přidávám fotku programu.
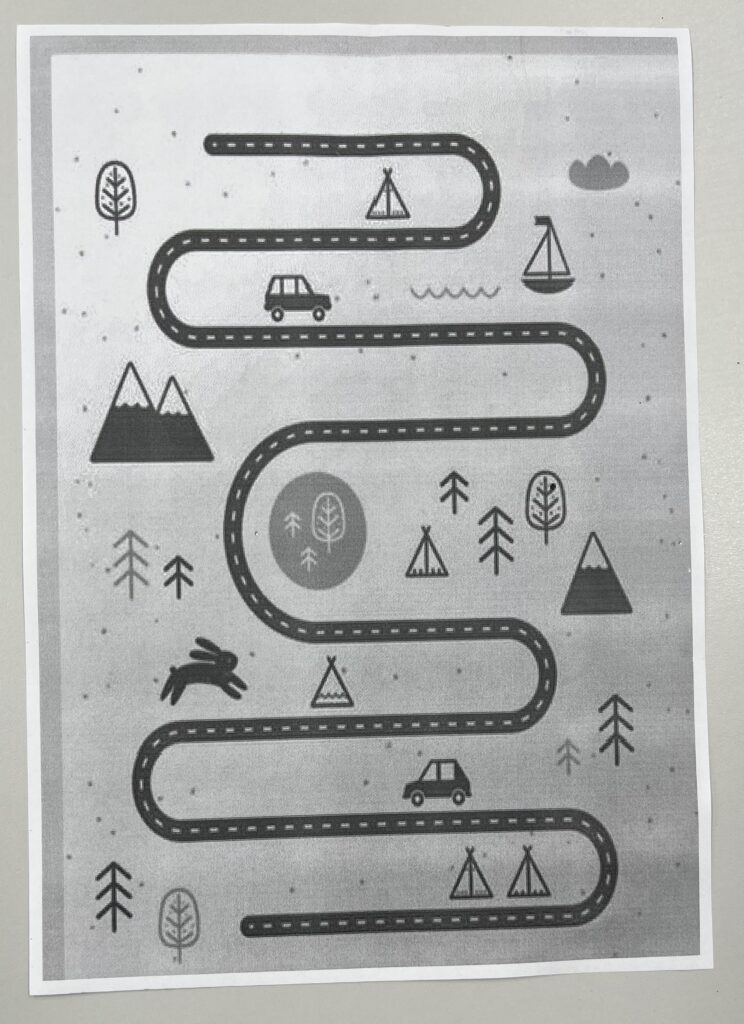
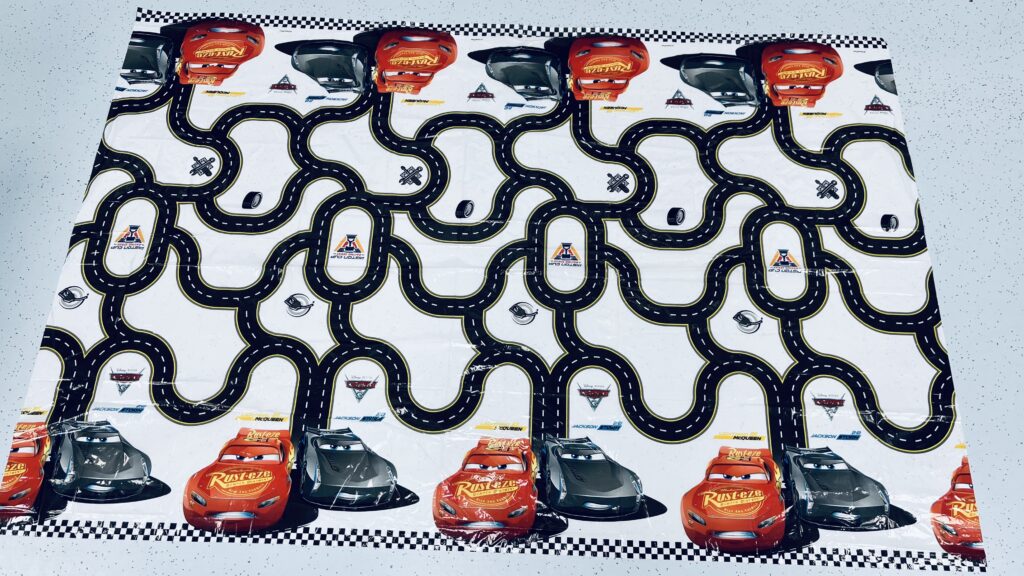
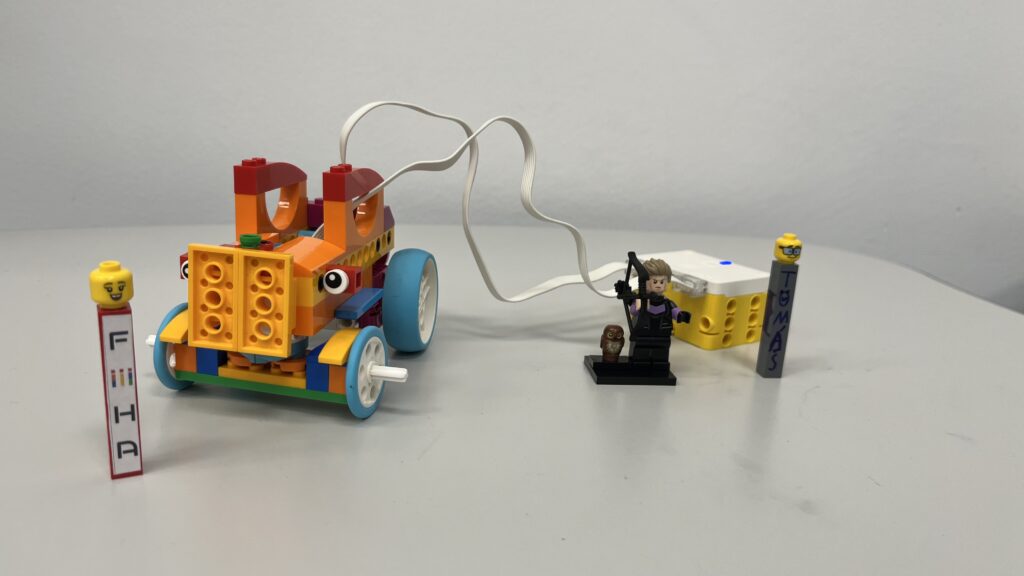
Děti tedy ovládaly jízdu auta nakláněním HUBu v ruce. Měly možnost trénovat jízdu autem na 3 typech dráhy. První dráha nikoho nebavila. Byla dost malá, proto sloužila jenom jako návod pro jízdu po podlaze. Druhý i třetí tip dráhy se setkal s větším úspěchem.
Větší soustředění jsem na lekci ještě nezažila. Během vteřiny bylo jasné, že ovládání zase nebude tak jednoduché. HUB je opravdu dost citlivý na to, jak moc a v jakém směru se nakloní. Byly okamžiky, kdy se děti tolik soustředily, že docházelo i k převrácení HUBu v ruce, aby auto nevyjelo z dráhy🤣. Koukněte na video.
Musím zhodnotit, že tato lekce byla opravdu náročná. Tolik nových pojmů, teorie a nelehká praktická zkušenost. K perfektní jízdě auta bylo zapotřebí držet HUBu rovnoběžně s podlahou a jemně ho naklánět. Zároveň si každý musel zhodnotit svou rychlost ruky s reakčním časem robota a v programu tomu přizpůsobit rychlost auta. Stalo se, že reagovalo rychleji než byla ruka schopná změnit náklon HUBu.


VELKÁ POCHVALA!!! 👍 OPĚT TO NIKDO NEVZDAL!!!
Těším se na další lekci.
Hanka Vítková
lektor kroužku Lego® robotiky